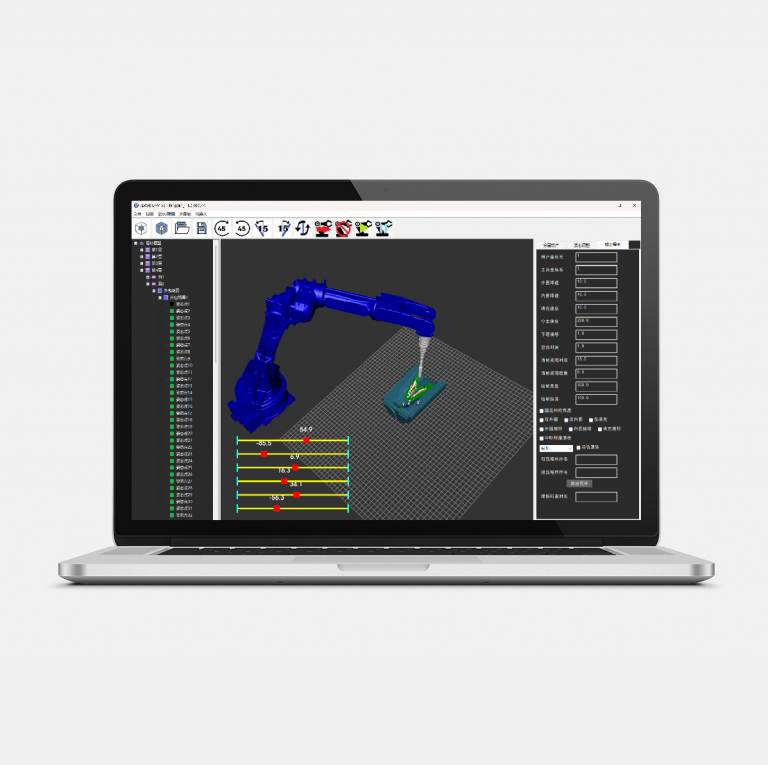
JLWeldCAM JLWeldCAM软件是一款为模具电弧增材再制造与修复而设计的机器人运行控制工具。针对不同类型复杂模具,用户可以用机器人代替焊工轻松实现高质、高效增材制造。 介绍手册 功能强大,智能 支持多种适合模具电弧增材的切片和填充路径方式,具有智能碰撞检测和最佳位姿调整功能。使用算法均是结合大量模具电弧增材再制造实验和制造经验数据得出并优化完成的,具有极强的实用性。导入增材和基体3D模型,针对模具尺寸和特征位置,结合江联焊接长期积累的模具堆焊工艺,仅需几分钟您就可计算、输出适用于多品牌机器人的增材再制造程序。 仿真、可修改 通过切片、动态路劲和姿态仿真,提前校研分层与路径布局的合理性,焊枪可达性和奇异点、让离线验证成为可能。输出的程序可直接使用,无需额外调试。 简单、易学 界面清晰、简洁,操作直观、易懂,无经验初学者能快速上手,轻松掌握各项功能。您无需花大量时间学习软件使用指南,输入有关参数,沿界面提醒,按确定键就能轻松完成编程。 支持外部轴 针对超大型、回转型模具及各类曲面随形表面增材制造工况,软件支持外部轴操作,如机器人滑轨和变位机,拓展了不同产品的增材制造和修复的适用范围及灵活性。 免费升级、定制开发 软件每天都应用于自身公司和大量客户的日常生产实践中,不断优化、完善和升级。软件属自主研发,可根据用户需求,提供个性化的定制服务。 使用演示 我们导入增材制造的基体 STL 模型。该模型定义了增材制造过程的基准对象,是整个操作流程的基础。软件进行路径规划,结合自定义的几何计算算法,高效生成用于控制机器人打印路径的程序。路径规划精准,确保制造过程的高效和质量。我们使用软件的碰撞检测功能,自动识别并避免机器人在增材制造过程中与环境或模型本身发生碰撞,确保操作的安全性与可靠性。软件将生成的路径和操作指令输出为机器人可执行的程序,确保离线编程的顺利进行。这套软件为电弧增材制造提供了简洁高效的全流程解决方案,帮助您优化生产流程,提升增材制造的效率与精度。